
Ur perspektivet av funktionell struktur är utförandet av vakuumgeneratorn huvudsakligen den elektromagnetiska styrventilen för att styra vakuumgeneratorn för att realisera negativt tryckgenerering och stoppa, för att uppnå funktionen att attrahera och släppa arbetsstycket.
Som ett resultat inkluderar systemet i allmänhet följande komponenter: 1. Tryckluftkälla;2. Filter;3. Byt magnetventil;4. Vakuumställdon;5. Ändsugkopp, krockkudde, etc. (En typisk struktur visas i figuren nedan).
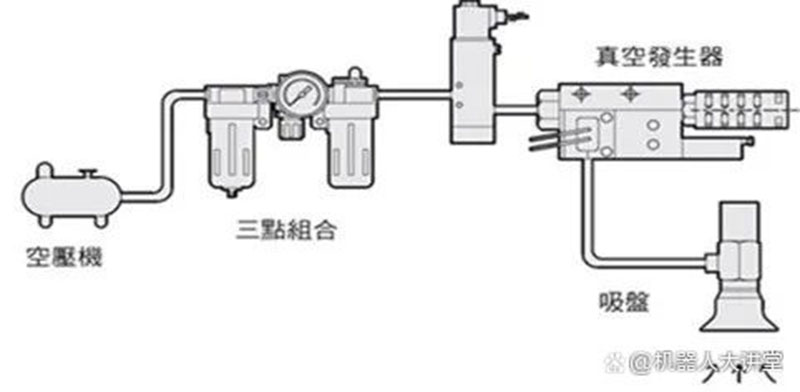
Dessutom, under kraven från industriell automation, för att förverkliga övervakningen av vakuumadsorptionsprocessen, lägger vissa tillverkare i allmänhet till pneumatiska styrkomponenter som flödesmätare, tryckavkänningsbrytare och närhetsbrytare till systemet under de senaste åren.
Men eftersom de flesta komponenterna modifieras av integratören enligt kundens behov och arbetsförhållandena på plats, är komplexiteten i hela systemet ofta hög.
Samtidigt leder flera komponenttillverkare till komplexa installations- och idrifttagningsarbeten på plats, och några av dem har hög energiförbrukning och 100 % beroende av gaskällor.Partiell integration kanske inte är möjlig
Undvik buller, vilket innebär oacceptabla problem för miljöer med hög precision och hög rena miljö som litiumbatterier och halvledare.
På det hela taget är EVS en ny generation av elektriska intelligenta vakuumställdon som inte kräver en extra tryckluftskälla, vilket utan tvekan är iögonfallande.
Den största fördelen med det luftbesparande systemet är dess enkla installation.Eftersom detta utan tvekan kan minska många hjälpkomponenter, inklusive luftkompressorer, luftlagringstankar, luftreningsutrustning och utgående rör, etc., vilket gör ledningar enklare och bekvämare och tydligare för kunderna att använda.
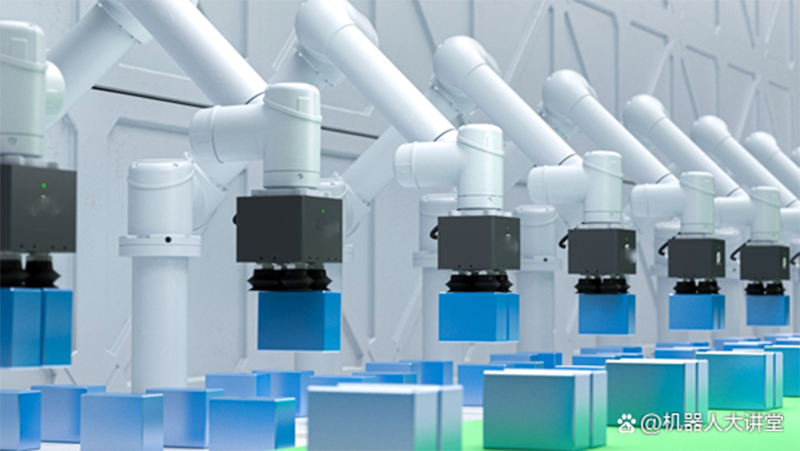
Det rapporteras att för närvarande har många scener inklusive mobila robotplattformar, 3C elektronisk montering, litiumbatteritillverkning, halvledartillverkning, expresslogistik etc. en relativt kompakt utrymmeslayout.
EVS08 sug fyrkantigt batteri
Fler detaljer och fördelar
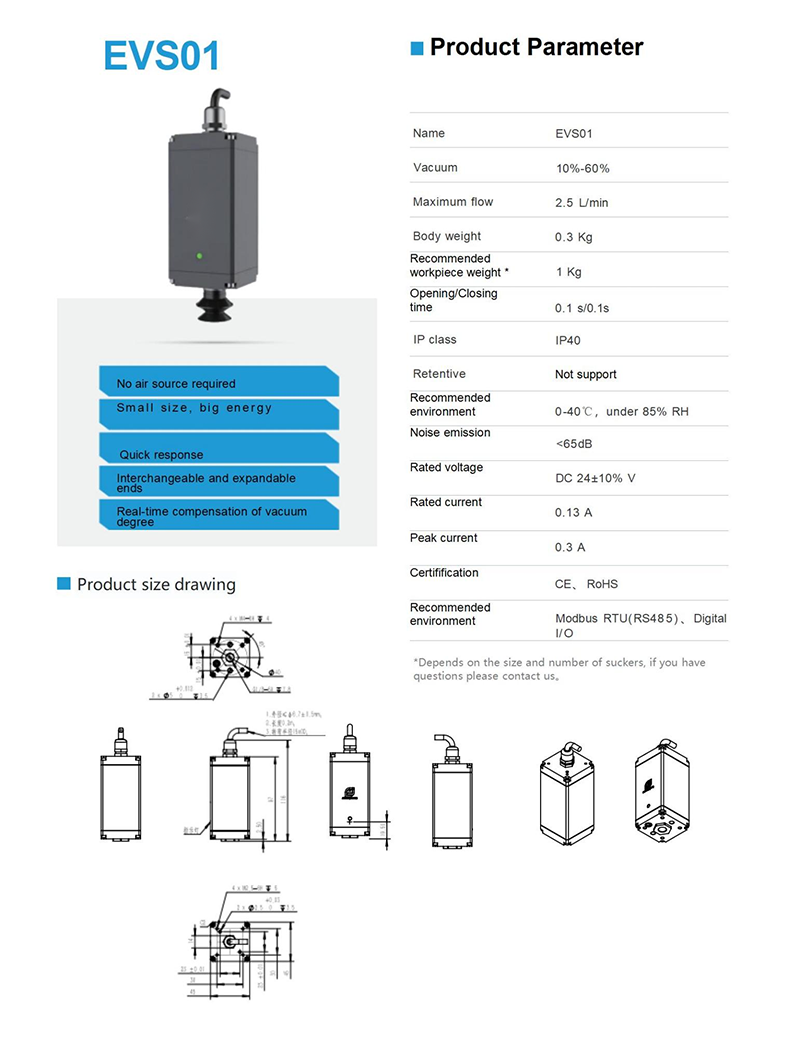
Robotföreläsningssalen lärde sig att denna produkt, som ser väldigt liten ut och väger endast 2,5 kg, kan nå en hög nivå på 10 kg.På grund av 24V lågspänningsdesignen är energiförbrukningen 20% av det traditionella pneumatiska systemet, och adsorptionskraften i slutet kan ställas in och justeras, och adsorptionskraften kan nå 102-510N.
När det gäller strukturell design antar EVS en mer kompakt och lätt strukturell design, vilket gör EVS 30 % mindre än traditionell aerodynamik för samma lastvikt.
Samtidigt kan den anslutas direkt till kontakten i änden av robotarmen, vilket minskar redundanta hjälpkomponenter, gör den mer flexibel att använda, kan snabbt sätta in och kan enkelt absorbera flera stora föremål, speciellt lämplig för stapling, hantering och andra scenoperationer .
För att förbättra användarvänligheten har det elektriska vakuumställdonet också ett integrerat gränssnitt, som kan användas för att kontrollera och övervaka hela processen med att adsorbera föremål.
Det rapporteras att detta är för att underlätta för kunderna att kontrollera vakuumgraden för vakuumaktuatorn genom instruktioner och även ansluta via IO-länken för övervakning och förutsägande underhåll av adsorptionsprocessen.Statusövervakning kommer att minska fel och driftstopp och säkerställa systemtillgänglighet.
På grundval av detta återspeglas fördelarna och egenskaperna hos EVS också i följande punkter:
1. Kompakt struktur och låg vikt: EVS är 30 % mindre än den traditionella pneumatiska storleken när den absorberar samma last.Den kan anslutas till kontakten i änden av den mekaniska armen för att realisera absorptionen av belastningen, särskilt lämplig för stapling, hantering och andra scenoperationer;
2. Riklig terminalkonfiguration: Olika typer av sugkoppar, krockkuddar och andra komponenter kan konfigureras för att förverkliga greppet om olika föremål, inklusive kvadratiska, sfäriska och specialformade komponenter;
3. Dubbla kanaler kan styras oberoende av varandra: kontrollera enkelt vänster och höger sida av vakuummanöverdonet, och de två sidorna är oberoende av varandra, vilket ytterligare förbättrar produktionslinjens arbetseffektivitet.Den realiserar sug och placering på samma gång, vilket i hög grad underlättar hantering och sortering av föremål, vilket sparar utrymme och tid;
4. Justerbar sug: graden av vakuum kan justeras enligt egenskaperna hos den sugna produkten, och vakuumkompensation i realtid kan realiseras;
5. Statusåterkoppling: Den har en vakuumåterkopplingssensor, som kan upptäcka adsorptionsstatus för objekt i realtid och ge feedback och larm;
6. Avstängningsskydd: Efter avstängning kan det realisera adsorptionsavstängning självlåsande för att skydda de adsorberade föremålen;
7. Stark anpassningsförmåga: stöder 24V I/O och MODBUS RTU (RS485) kommunikationsprotokoll;
8. Lätt att installera och felsöka: kommunikationsprotokollet är enkelt och läsbart, vilket avsevärt minskar svårigheten att felsöka.Dessutom kan värddatorns felsökningsprogram bifogas som en gåva, som kan ställas in och redigeras för att ställa in funktionsparametrar offline.
Slutsats och framtiden
Under trenden med automation och intelligens har elektriska vakuumställdon alltmer blivit en nyckelkomponent för att säkerställa normal drift av robotar och automationssystem, vilket gör användningen av elektriska ställdonssystem bekvämare och enklare att använda, och kan möta mer diversifierade scenarier som t.ex. mobila kompositrobotar..
Det integrerade gränssnittet och rika terminalkonfigurationen och andra optimeringar kan ytterligare förbättra tillförlitligheten hos robotens nyckelkomponenter, minska produktionsstopp och fjärrinstallationsproblem för slutanvändare och ytterligare minska underhålls- och efterförsäljningskostnader.
Posttid: 2023-apr-19